I primi studi relativi al motore con pistone rotativo (stantuffo rotante) risalgono al 1920 (Umpleby)
ed hanno raggiunto un livello applicativo nel 1963 (NSU) con la realizzazione di una autovettura
equipaggiata con tale motore.
La rotazione del pistone o stantuffo rispetto alla camera è pilotato da una coppia di ruote dentate,
l’una con dentatura interna solidale con il pistone, l’altra con dentatura esterna solidale con la
camera, quindi fisso.
Il rapporto del numero dei denti è uguale a quello fra il numero dei vertici del rotore ed il numero
dei lobi del profilo dello statore.
Si fa rilevare che tutte le aziende che hanno intrapreso la costruzione di motori Wankel hanno
scelto il tipo con camera a due lobi e rotore a tre vertici.
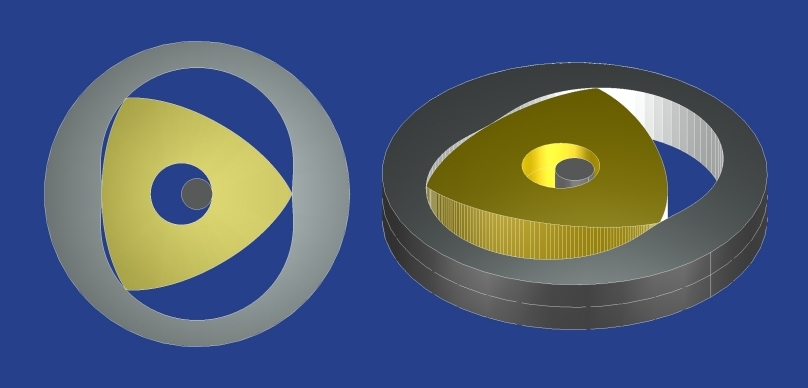
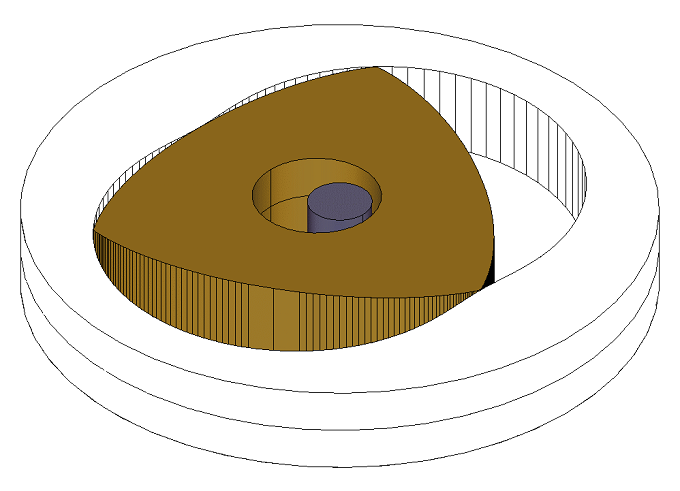
Il profilo dello statore è costituito da una EPITROCOIDE mentre il profilo del rotore (definito
profilo limite) è generato dall’inviluppo interno del profilo dello statore, nel suo moto rispetto al
rotore considerato fisso.
-Solido WANKEL generato-
-Inviluppo interno-
Si possono quindi verificare le seguenti condizioni, sufficienti a generare i profili di statore e rotore
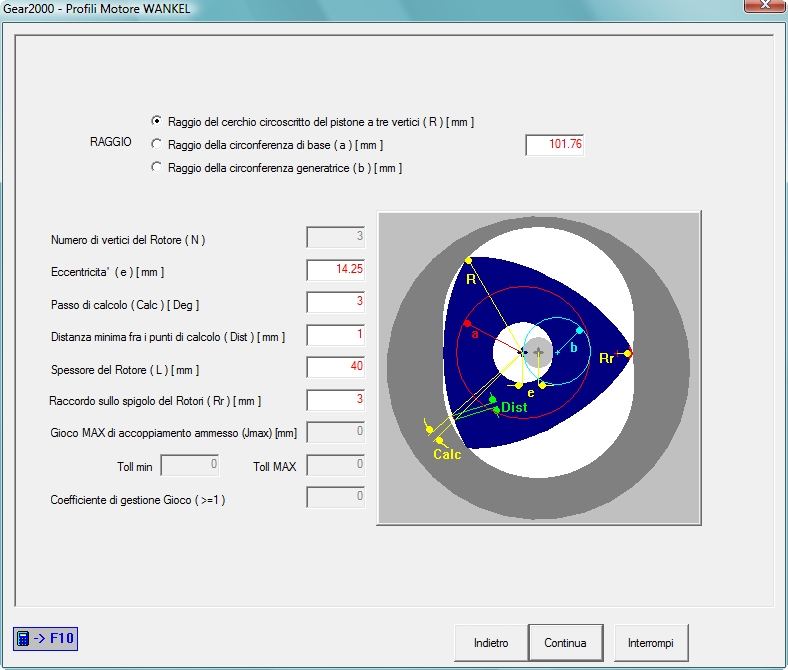
del motore, correttamente dimensionato, quando siano noti :
|
R : Raggio del cerchio
circoscritto del pistone a tre
vertici.
Semi-Asse Maggiore = R + e
Semi-Asse Minore = R – e
Raggio della circonf. di base
a = ( 2 * R ) / 3
Raggio della circonf.
generatrice b = R / 3
|
a : Raggio della circonferenza
di base.
Raggio della circonf.
generatrice b = a / 2
Raggio del cerchio circoscritto
del pistone a tre vertici
R = a + b
Semi-Asse Maggiore = R + e
Semi-Asse Minore = R – e
|
b : Raggio della circonferenza
generatrice.
Raggio della circonferenza di
base a = b * 2
Raggio del cerchio circoscritto
del pistone a tre vertici
R = a + b
Semi-Asse Maggiore = R + e
Semi-Asse Minore = R – e
|
Il rapporto di trasmissione del cinematismo vale : RS / RS1 = ( K – 1 ) / K
Nel caso dell’Epitrocoide a due archi in cui K = 3 , risulta RS / RS1 = 2 / 3
Nel motore Wankel Il movimento è materializzato sostituendo alla circonferenza di raggio RS un
ingranaggio fisso a dentatura esterna con raggio primitivo RS , e ad RS1 un ingranaggio a
dentatura interna con raggio primitivo RS1.
Disponendo dei dati in INPUT sopra analizzati, relativi alle condizioni 1, 2, o 3, è
possibile
tracciare il profilo parziale dello statore.
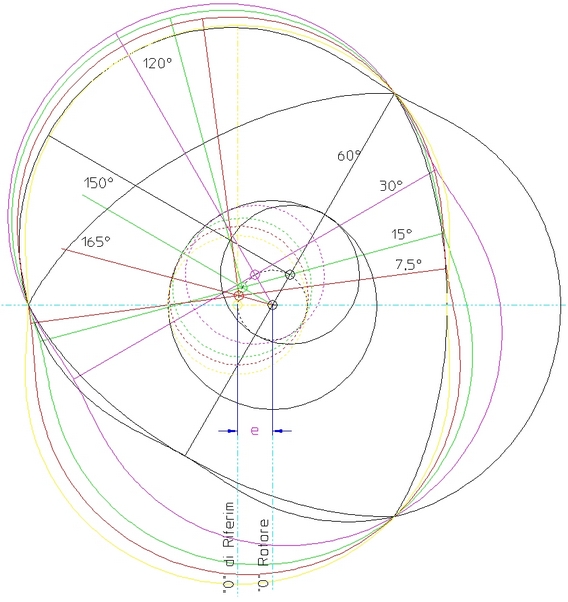
L’inviluppo interno del profilo dello statore, Epitrocoide, restituisce il profilo limite del Rotore, nella
simulazione, lo Statore rimane fermo, il rotore ruota entro lo statore muovendo il suo Zero ( Punto
equidistante dai vertici ) sulla circonferenza con raggio uguale alla eccentricità.
Il Rotore o Pistone, compie nel frattempo tre giri di rivoluzione planetaria, intorno al suo Zero, per
ciascun giro di rotazione della manovella, rappresentata dallo eccentrico e.
GEAR2000 Help